")
Оглавление:
- Шаг 1: Как это работает
- Шаг 2: обратите внимание перед началом
- Шаг 3: соберите весь материал
- Шаг 4. Различные размеры
- Шаг 5: Делаем тело
- Шаг 6: Сборка привода и изготовление пластины
- Шаг 7: Настройка волновых характеристик
- Шаг 8: Электронные соединения и программа
- Шаг 9: Управление приводами с помощью программы, управляемой из меню
- Шаг 10: Как работать с волновым резервуаром
- Автор John Day day@howwhatproduce.com.
- Public 2024-01-30 11:53.
- Последнее изменение 2025-01-23 15:05.



Волновой резервуар - это лабораторная установка для наблюдения за поведением поверхностных волн. Типичный волновой резервуар представляет собой коробку, заполненную жидкостью, обычно водой, оставляя наверху открытое или заполненное воздухом пространство. На одном конце резервуара исполнительный механизм генерирует волны; другой конец обычно имеет поверхность, поглощающую волны.
Обычно эти резервуары стоят больших денег, поэтому я попытался сделать действительно действительно дешевое решение для студентов, которые хотят использовать резервуар для тестирования своих проектов.
Шаг 1: Как это работает
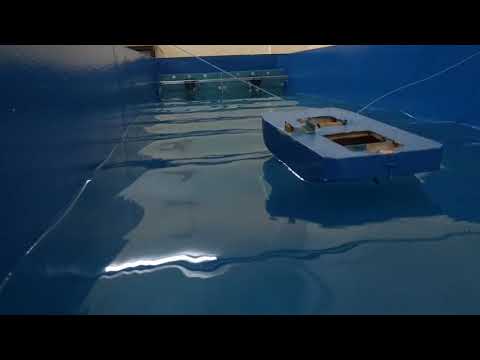
Таким образом, проект состоит из двух приводов, изготовленных из алюминиевых профилей с v-образным пазом.
Шаговый двигатель подключен к каждому приводу, и оба двигателя управляются одним и тем же приводом шагового двигателя, поэтому нет задержки.
Arduino используется для управления драйвером двигателя. Программа, управляемая меню, используется для ввода данных в arduion, подключенный через компьютер. Приводные пластины установлены на портале с v-образным пазом, который будет двигаться вперед и назад после запуска двигателей, и это движение пластин вперед и назад генерирует волны внутри резервуара. Высота волны и длина волны могут быть изменены путем изменения скорости движения. мотор через ардуино.
Шаг 2: обратите внимание перед началом

Я не рассмотрел большинство мелких вещей, как использовать Arduino или как выполнять сварку, чтобы этот учебник был небольшим и легким для понимания. Большинство недостающих вещей будет очищено на изображениях и видео. Пожалуйста, напишите мне, если возникнут какие-либо проблемы или вопросы по проекту.
Шаг 3: соберите весь материал
- Микроконтоллер Arduino
- 2 * шаговый двигатель (крутящий момент 2,8 кгсм на двигатель)
- 1 * Драйвер шагового двигателя
- 2 * V-образная портальная система
- Стальные или железные пластины для корпуса резервуара
- Г-образные ребра жесткости для поддержки кузова
- Лист из волокна или пластика для изготовления пластины привода
- Провода Источник питания постоянного тока 48 В
Я не включил материалы для портала с v-образным слотом, потому что список будет очень большим, тогда просто в Google v-slot вы получите много видео о том, как его собрать. Я использовал экструзию алюминия 2040. Мощность двигателя и мощность источника питания изменятся, если вы захотите выдержать большую нагрузку.
Размеры резервуара
Длина 5.50 м
Ширина 1.07 м
Глубина 0,50 м
Шаг 4. Различные размеры



Чтобы упростить задачу и сделать учебник короче, я сделал изображения различных компонентов с такой шкалой, чтобы вы могли видеть их размеры.
Шаг 5: Делаем тело




Корпус изготовлен из чугуна толщиной 3 мм.
Ширина резервуара составляет 1,10 метра, длина 5 метров и высота 0,5 метра.
Корпус бака изготовлен из низкоуглеродистой стали с ребрами жесткости, где это необходимо. Пластины из мягкой стали сгибали и разрезали на различные секции в соответствии с размерами резервуара. Затем эти секции были возведены путем их сварки. Ребра жесткости также были сварены вместе, чтобы сделать конструкцию более прочной.
Сначала пластина была согнута до желаемого размера в различных секциях, а затем эти секции были сварены вместе, чтобы собрать корпус. Ребра жесткости были добавлены, так как размеры ребер жесткости опоры показаны на рисунке.
Шаг 6: Сборка привода и изготовление пластины



Приводы изготавливаются с использованием систем с V-образным пазом. Они действительно дешевы и просты в сборке, вы можете в Интернете узнать, как собрать один из них. Я использовал ходовой винт вместо ременной передачи, чтобы увеличить грузоподъемность. Я не включил руководство по сборке, потому что оно будет меняться в зависимости от нагрузки, которую вы хотите нести. Для меня нагрузка на максимальной скорости была около 14 кг.
Пластина привода изготовлена из листового материала, также можно использовать акрил. Рама из нержавеющей стали была построена для поддержки листового материала.
Рама весла
Рама лопасти изготовлена из нержавеющей стали. Нержавеющая сталь водонепроницаема и поэтому устойчива к коррозии. Для рамы весла использовалось квадратное сечение 2 х 2 см. Прочная рама была необходима, так как во время генерации волн на лопасть будет действовать большая циклическая нагрузка. Стальной каркас не сгибается и, следовательно, генерирует регулярную синусоидальную волну.
Был изготовлен заказной L-образный зажим для соединения пластины привода с платформой портала в системе vslot.
Шаг 7: Настройка волновых характеристик



Резервуар может генерировать волны различной высоты в зависимости от требований. Для генерации волны различной высоты регулируется частота вращения двигателя. Чтобы получить большую высоту волны, увеличивают частоту вращения двигателя, а также уменьшают длину волны. Аналогично увеличению длины волны уменьшается частота вращения двигателя. Число оборотов в минуту можно отрегулировать, выбрав опцию пользовательского числа оборотов в меню.
Максимальная частота вращения = 250
Минимальная частота вращения = 50
Ниже приведен пример различной высоты волны, зарегистрированной акселерометром. Первое изображение - это данные, записанные на высоких оборотах, в результате чего мы получаем большую высоту волны. Второе изображение показывает уменьшенную высоту волны и увеличенную длину волны графика, который представляет собой данные, записанные акселерометром, и представляет фактические волновые характеристики сгенерированной волны.
Шаг 8: Электронные соединения и программа

При подключении источника питания соблюдайте полярность подключения: подключите положительную клемму к положительной, а отрицательную - к отрицательной. Выполните подключения двигателя и драйвера, как показано на рисунке. Как только все подключения будут правильными, подключите контакты микроконтроллера (8, 9, 10 и 11).) к драйверу шагового двигателя. Подключите микроконтроллер к ПК через USB. Запустите Arduino IDE> Последовательный монитор.
Программа включена в учебное пособие и не требует пояснений, она использует для работы операторы switch case и if else. Это действительно просто, и ученик средней школы также может ее понять.
Вот ссылка на гугл диск на программу
Программа управления Arduino
Шаг 9: Управление приводами с помощью программы, управляемой из меню

После того, как микроконтроллер правильно подключен к ПК, вы увидите аналогичное меню. Чтобы выбрать опцию, просто введите число рядом с опцией и нажмите ввод.
Пример:-
Чтобы выбрать «Активировать на максимальной частоте», введите 1 и нажмите Enter.
Чтобы остановить действие, введите 0 и нажмите Enter.
Экстренная остановка
Чтобы остановить привод, нажмите на ноль «0» и введите.
Чтобы выполнить аварийную остановку, нажмите кнопку сброса на микроконтроллере или отключите питание.
Шаг 10: Как работать с волновым резервуаром

Этот танк создавался в рамках моего крупного проекта. Танк прошел испытания на генерацию различных регулярных волн в условиях встречного моря на масштабной модели баржи. Испытания волнового лотка прошли успешно. Общая стоимость разработки этого проекта составляла рупий. 81 000 (только восемьдесят одна тысяча) в течение двух месяцев.
По любым вопросам прокомментируйте.

Первая премия в конкурсе воды
Рекомендуемые:
Как сделать автоматический вращающийся лоток для яиц из ПВХ и дерева: 5 шагов

Как сделать автоматический вращающийся лоток для яиц из ПВХ и дерева: если вы видели, как курица переворачивает яйца, вы можете заметить, что она имеет тенденцию полностью вращать яйцо своими ногами, это наиболее распространенный и эффективный метод, он переворачивает эмбрион внутри яйца и надевает его. не оставили ни единого шанса застрять в оболочке, поэтому я
Лоток для яичного инкубатора с автоматическим переворачиванием из дерева: 7 шагов (с изображениями)
")
Лоток для инкубатора с автоматическим переворачиванием яиц из дерева: Привет и добро пожаловать в мой инструктор! В этом проекте я делаю автоматический поворотный лоток для яиц, который будет использоваться в инкубаторе, это очень простой механизм и его легко сделать, потому что он не требует большого количества инструментов. , эта модель наклоняет лоток более чем на 45 градусов
Как починить лоток для клавиатуры со скобами: 5 шагов

Как починить лоток для клавиатуры со скобами: лоток для клавиатуры сломался из-за того, что на него упирался. Он бы не сломался, если бы они включали два винта. Но скобы забыли
Лоток для компакт-дисков Canon Pixma: 5 шагов

Лоток для компакт-дисков Canon Pixma: многие принтеры Canon Pixma могут печатать непосредственно на компакт-дисках и DVD-дисках, но были отключены Canon. Включить сам принтер очень просто, но вы по-прежнему остаетесь без лотка для дисков OEM. ОБНОВЛЕНИЕ. Ссылка на изображение теперь доступна
Лоток для охлаждения ноутбука: 8 шагов

Лоток для охлаждения ноутбука: с помощью других инструкций я хотел создать один, описывающий, что я сделал, чтобы остановить постоянно повторяющиеся синие экраны и розничные технические специалисты, пытающиеся продать мне решение за 100 долларов США … В любом случае, вот мое охлаждающее решение. Извините за фотографии, ха