![[vPython] Симулятор робота-паука: 4 шага](https://i.howwhatproduce.com/images/003/image-8663-22-j.webp "[vPython] Симулятор робота-паука: 4 шага")
Оглавление:
- Автор John Day day@howwhatproduce.com.
- Public 2024-01-30 11:53.
- Последнее изменение 2025-01-23 15:05.


Если вам интересен мой дизайн, сделайте небольшое пожертвование:
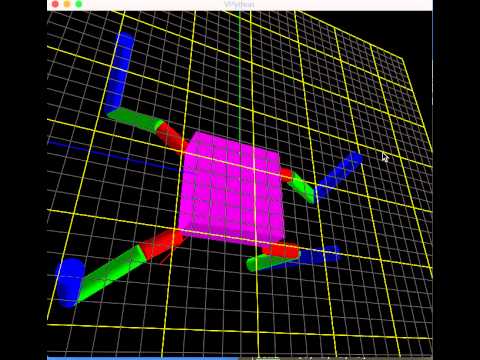
Я использую vPython для имитации действий моего робота-паука. Это позволит легко разработать собственные действия по интересам на ПК / Mac, а затем портировать их на Arduino.
Есть настоящий робот, который можно проинструктировать, если он вам интересен
www.instructables.com/id/DIY-Spider-RobotQu…
VPython - это язык программирования Python плюс модуль трехмерной графики под названием «visual», созданный Дэвидом Шерером в 2000 году. VPython упрощает создание удобных для навигации трехмерных дисплеев и анимаций даже для людей с ограниченным опытом программирования. Поскольку он основан на Python, он также может многое предложить опытным программистам и исследователям.
Шаг 1. Установите VPython и редактор


установить python , Я предлагаю использовать 2.7.x
www.python.org/
а затем vpython
vpython.org/
и мой любимый редактор - PyCharm
www.jetbrains.com/pycharm/
Шаг 2. Загрузите код и запустите

Загрузите код и откройте его с помощью PyCharm, запустите код, и вы увидите на экране причудливого 3D-робота-паука, и вы можете использовать мышь со средней кнопкой для увеличения / уменьшения и правой кнопкой для поворота.
Шаг 3. Разработайте свои действия в этом симуляторе
Будет весело, если вы сможете разработать более интересные действия и поделиться со мной.
Шаг 4: Пульт дистанционного управления настоящим роботом-пауком
Как насчет управления настоящим роботом с помощью Python, думающего по Bluetooth? Возможно, вы уже захотите попробовать этот способ. Позже выложу, если кому-то понадобится.
Рекомендуемые:
2d симулятор посадки ракеты: 3 шага

2d Rocket Landing Sim: вам нужно будет сделать фон, нарисовать ракеты и индикатор, чтобы начать (конечно, вам понадобится подключение к Интернету, чтобы использовать скретч), если вы просто хотите поиграть в симуляцию / игру, нажмите здесь или перейти на https://scratch.mit.edu/projects/432509470
СИМУЛЯТОР ГОНКИ СДЕЛАЙ САМ -- СИМУЛЯТОР F1: 5 шагов

СИМУЛЯТОР ГОНКИ СДЕЛАЙ САМ || СИМУЛЯТОР F1: Привет всем, добро пожаловать на мой канал! Сегодня я покажу вам, как я создаю «Симулятор гоночной игры». с помощью Arduino UNO. это не блог о сборке, это просто обзор и тест симулятора. Скоро появится блог о полной сборке
КАК СОБРАТЬ ВПЕЧАТЛЯЮЩУЮ ДЕРЕВЯННУЮ РУКОЯТКУ РОБОТА (ЧАСТЬ 3: РУКОЯТКА РОБОТА) - НА ОСНОВЕ МИКРО: BITN: 8 шагов
 - НА ОСНОВЕ МИКРО: BITN: 8 шагов")
КАК СОБРАТЬ ВПЕЧАТЛЯЮЩУЮ ДЕРЕВЯННУЮ РУКОЯТКУ РОБОТА (ЧАСТЬ 3: РУКОЯТКА РОБОТА) - НА ОСНОВЕ МИКРО: BITN: Следующий процесс установки основан на завершении режима избегания препятствий. Процесс установки в предыдущем разделе такой же, как и процесс установки в режиме отслеживания строк. Тогда давайте посмотрим на окончательную форму A
[Робот Arduino] Как сделать робота захвата движения - Большой палец руки робота - Серводвигатель - Исходный код: 26 шагов (с изображениями)
![[Робот Arduino] Как сделать робота захвата движения - Большой палец руки робота - Серводвигатель - Исходный код: 26 шагов (с изображениями)](https://i.howwhatproduce.com/images/001/image-1599-93-j.webp "[Робот Arduino] Как сделать робота захвата движения - Большой палец руки робота - Серводвигатель - Исходный код: 26 шагов (с изображениями)")
[Робот Arduino] Как сделать робота захвата движения | Большой палец руки робота | Серводвигатель | Исходный код: Thumbs Robot. Использовал потенциометр серводвигателя MG90S. Это очень весело и просто! Код очень простой. Это всего около 30 строк. Это похоже на захват движения. Пожалуйста, оставьте любой вопрос или отзыв! [Инструкция] Исходный код https: //github.c
Создайте очень маленького робота: сделайте самого маленького в мире колесного робота с захватом: 9 шагов (с изображениями)
")
Создайте очень маленького робота: создайте самого маленького в мире колесного робота с захватом. Создайте робота объемом 1/20 куб. Дюйма с захватом, который может поднимать и перемещать мелкие предметы. Он управляется микроконтроллером Picaxe. На данный момент я считаю, что это может быть самый маленький в мире колесный робот с захватом. Без сомнения, ч