
Оглавление:
- Автор John Day day@howwhatproduce.com.
- Public 2024-01-30 11:48.
- Последнее изменение 2025-01-23 15:04.


Эта схема представляет собой маятниковый драйвер.
Двигатель может вращаться по часовой стрелке и против часовой стрелки в зависимости от направления тока.
Вы можете увидеть, как работает схема на видео.
Запасы
Компоненты: индукторы - 2 (щелчок, большая катушка или реле), резисторы (показаны на схеме), источник питания (две батареи 9 В на одну батарею 12 В), мощные диоды - 2, картонная или матричная плата, провода - 1 шт. металлическая проволока мм, припой, изолированные провода, силовые NPN BJT-транзисторы - 2, радиаторы - 2, общие NPN и PNP транзисторы - 5, корпус (картонный или пластиковый ящик).
Инструменты: инструмент для зачистки проводов, ножницы, плоскогубцы, паяльник.
Дополнительные инструменты: USB-осциллограф, мультиметр.
Шаг 1: спроектируйте схему

Я нарисовал схему с помощью старой программы моделирования PSpice, чтобы сократить время рисования схемы.
Идеальная разряженная катушка индуктивности изначально представляет собой разомкнутую цепь. Через несколько секунд или миллисекунд индуктор полностью зарядится. (для больших индукторов требуется больше времени для зарядки) индуктор становится эквивалентом короткого замыкания. Вы можете сократить время зарядки, увеличив сопротивление, которое «видит» индуктор, или увеличив ток зарядки:
Vl (t) = L * di (t) / dt
Транзисторный выход можно смоделировать как источник тока, обеспечивающий постоянный ток зарядной катушки индуктивности. Диоды используются для разряда двух катушек индуктивности и ограничения максимального напряжения на разряженных катушках индуктивности.
Транзисторы Q1a и Q2a образуют буферную схему, а транзистор Q1b является инвертором. Щелкните следующую ссылку, чтобы увидеть аналогичную схему:
hackaday.io/page/6956-silly-robot
Шаг 2: Моделирование



Я использовал программу PSpice, которая позволяет проводить быстрое моделирование.
Вы можете увидеть напряжения зарядки и разрядки индуктора (показаны на первом графике).
Вы также можете видеть, что максимальный ток двигателя составляет 20 мА (показано на втором графике).
Шаг 3: Сделайте схему

Я сделал только драйвер мотора. Буфер и инвертор я не делал.
Я реализовал схему на двух старых советских диодах.
Я использовал два резистора большой мощности 10 Ом, которые при параллельном подключении дают 5 Ом.
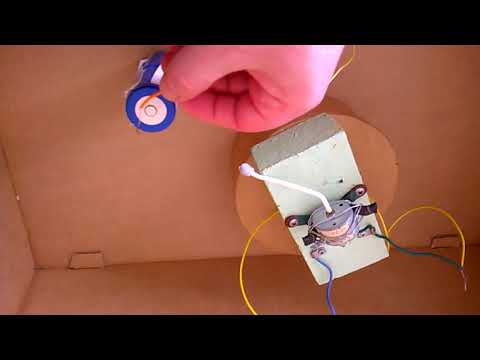
Катушки были реализованы с помощью двух кликеров от старого прибора.
Шаг 4: поместите схему в коробку

В качестве футляра использовала старую подарочную коробку.
Шаг 5: Тестирование

Я тестировал схему с двумя батареями 9 В и блоком питания 15 В.
Рекомендуемые:
Электромагнитный маятник: 8 шагов (с изображениями)
")
Электромагнитный маятник: Еще в конце 80-х я решил, что хочу построить часы полностью из дерева. В то время не было Интернета, поэтому проводить исследования было гораздо труднее, чем сегодня … хотя мне удалось собрать очень грубое колесо
Péndulo Inteligente De Newton Con Electricidad (Маятник Ньютона с электричеством): 17 шагов (с изображениями)
: 17 шагов (с изображениями)")
Péndulo Inteligente De Newton Con Electricidad (Маятник Ньютона с электричеством): Это проект, который дает нам финобразование, в результате вы получаете любопытный результат и помогаете понять, как работает электричество в медицине. Pienso que es una buena Herramienta para ense ñ ar a las personas el Principio del P é ndu
Перевернутый маятник: теория и динамика управления: 17 шагов (с изображениями)
")
Перевернутый маятник: теория управления и динамика. Перевернутый маятник - классическая проблема динамики и теории управления, которая обычно разрабатывается в средней школе и на курсах физики или математики в бакалавриате. Будучи энтузиастом математики и естественных наук, я решил попробовать реализовать эти концепции
Магический маятник мудрости: 8 шагов

Магический маятник мудрости: мне всегда нравились завораживающие хаотические движения двойных маятников. Некоторое время назад я видел видео, где этот парень прикрепил УФ-светодиод, чтобы проследить путь, по которому движется маятник. (https://www.youtube.com/watch?v=mZ1hF_-cubA) Мне понравился этот эффект
JustAPendulum: Цифровой маятник с открытым исходным кодом: 13 шагов

JustAPendulum: Цифровой маятник с открытым исходным кодом: JustAPendulum - это маятник с открытым исходным кодом на базе Arduino, который измеряет и вычисляет период колебаний для определения гравитационного ускорения Земли (~ 9,81 м / с²). Он содержит самодельный Arduino UNO, который использует адаптер USB-последовательный порт для связи