")
Оглавление:
- Шаг 1. Печать и сборка
- Шаг 2: Новая база
- Шаг 3. Небольшое исправление
- Шаг 4: Самодельная печатная плата
- Шаг 5: травление печатной платы
- Шаг 6: фрезерование печатной платы
- Шаг 7: Фрезерование печатной платы: получить файл для производства
- Шаг 8: Фрезерование печатной платы: процесс фрезерования
- Шаг 9: Фрезерование печатной платы: очистите работу
- Шаг 10: Пайка компонента
- Шаг 11: Прошивка и программное обеспечение
- Шаг 12: Тестирование
- Шаг 13: продолжить сборку
- Шаг 14: Калибровка
- Шаг 15: Первый тест на мандаринский диалект
- Шаг 16: Спасибо
- Автор John Day day@howwhatproduce.com.
- Public 2024-01-30 11:52.
- Последнее изменение 2025-01-23 15:05.


Всем привет, Я собираюсь реализовать знаменитый 3D-сканер Ciclop.
Все шаги, которые хорошо объяснены в исходном проекте, отсутствуют.
Я сделал некоторые исправления, чтобы упростить процесс, сначала я распечатываю базу, а затем повторно настраиваю печатную плату, но продолжаю.
Шаг 1. Печать и сборка
Для сборочной части лучшим решением является ссылка на оригинальную документацию.
www.bq.com/it/support/ciclop/support-sheet
на многоязычном и хорошо объясненном.
Печатная часть довольно проста в сборке.
Видео тоже очень много, официальная вот такая.
Шаг 2: Новая база


Единственная деталь, которую трудно найти, - это основа из оргстекла, поэтому я создаю ее для печати на своем 3d-принтере Anet A8.
Вы можете найти проект здесь.
Шаг 3. Небольшое исправление


Другая проблема заключается в том, что вы, вероятно, можете найти недорогой лазер, который не поместится на оригинальном держателе.
Обычный лазер - это лазер 12 мм.
Так что вы можете использовать этот печатный вариант.
Другая проблема - остановить вращающуюся часть, я думаю, что лучшим решением будет использование резинки, как вы можете видеть на картинках.
Шаг 4: Самодельная печатная плата

Для этого проекта я сделал печатную плату полностью совместимой с оригинальной. Zum scan более сложен, но все дополнительные функции не используются.
Моя версия предназначена для Arduino Nano, поэтому она меньше оригинальной.
Если у вас нет навыков автоматического производства печатных плат, вы можете использовать файл gerber, который вы можете найти в статье, для отправки на завод, производящий печатные платы, например
Шаг 5: травление печатной платы
Я никогда не использовал эту технику, но я добавляю на этот шаг файл svg или PDF для производства.
Шаг 6: фрезерование печатной платы
Я использую эту технику для личного производства, об этом пишу 2 статьи:
Первый - это пошаговое руководство по созданию портативного станка с ЧПУ, оптимизированного для фрезерной обработки с ЧПУ.
Вот гид.
Чем предыдущее руководство, в котором шаг за шагом объясняется, как использовать машину, как создать печатную плату и как создать файл для производства.
Вот другой гид.
Шаг 7: Фрезерование печатной платы: получить файл для производства
Я добавляю сюда файл для производства, гербер или непосредственно gcode для фрезерного станка
Шаг 8: Фрезерование печатной платы: процесс фрезерования



Сначала фрезеруйте медное дно, затем просверлите отверстие.
Шаг 9: Фрезерование печатной платы: очистите работу


Затем используйте наждачную бумагу, чтобы сделать доску ровной и чистой.
Шаг 10: Пайка компонента



Для этой платы я использую:
- Ардуино Нано
- A4988 Драйвер шагового двигателя
- 2x 1 кОм резистор
- 1x резистор 10 кОм
- 2x 2n2222 транзистор
- 5.5 Бочка для входного напряжения
Я использую блок питания 12v 2A (на ствол) для питания шагового драйвера.
Разъема usb достаточно для лазера и Arduino.
Шаг 11: Прошивка и программное обеспечение

Вы можете скачать прошивку для загрузки в Arduino отсюда.
github.com/bqlabs/horus-fw
Как описано в руководстве, камера представляет собой веб-камеру Logitech C270 HD, драйвер здесь.
support.logitech.com/en_ca/product/hd-webca…
Вы можете найти программное обеспечение здесь.
horus.readthedocs.io/en/release-0.2/
если у вас возникнут проблемы с загрузкой, вы можете перейти сюда
github.com/LibreScanner/horus/releases
Шаг 12: Тестирование

Сначала я тестирую все без камеры, и все работает хорошо.
Вы можете использовать ino-файл для проверки лазера и шагового двигателя
Шаг 13: продолжить сборку


Затем я добавляю камеру, фиксирую доску и добавляю черную бумагу наверху платформы.
Шаг 14: Калибровка
По калибровке много видео, этот шаг очень простой.
Я реализовал это минимальное видео с моим новым Ciclop.
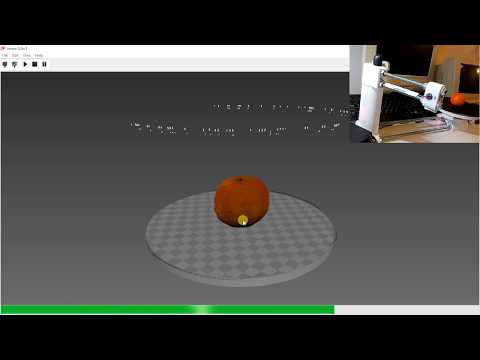
Шаг 15: Первый тест на мандаринский диалект
В этом видео я сканирую только объект, но чтобы получить хорошее изображение, вы должны выполнить некоторую пост-обработку с помощью программного обеспечения, такого как MeshLab.
Шаг 16: Спасибо
Теперь начнем сканировать все.
Рекомендуемые:
Как: установка Raspberry PI 4 Headless (VNC) с Rpi-imager и изображениями: 7 шагов (с изображениями)
 с Rpi-imager и изображениями: 7 шагов (с изображениями)")
Как: установка Raspberry PI 4 Headless (VNC) с Rpi-imager и изображениями: я планирую использовать этот Rapsberry PI в кучу забавных проектов еще в моем блоге. Не стесняйтесь проверить это. Я хотел вернуться к использованию своего Raspberry PI, но у меня не было клавиатуры или мыши в моем новом месте. Прошло много времени с тех пор, как я установил Raspberry
DIY IBeacon and Beacon Scanner с Raspberry Pi и HM13: 3 шага

DIY IBeacon и сканер маяков с Raspberry Pi и HM13: история Маяк будет непрерывно транслировать сигналы, чтобы другие устройства Bluetooth знали о его присутствии. И я всегда хотел иметь Bluetooth-маяк для отслеживания моих ключей, так как я уже забыл принести их примерно 10 раз в прошлом году. А у меня случается
Cat-a-way - Спринклер для кошек с компьютерным зрением: 6 шагов (с изображениями)
")
Cat-a-way - Computer Vision Cat Sprinkler: Проблема - Кошки, использующие ваш сад в качестве туалета Решение - Потратьте слишком много времени на разработку спринклера для кошек с функцией автоматической загрузки на YouTube Это не пошаговая инструкция, а обзор конструкции и некоторые другие code # BeforeYouCallPETA - Кошки
MIDI Step Interface (версия на испанском языке): 12 шагов
: 12 шагов")
Интерфейс MIDI Step (версия на испанском языке): Версия на английском языке. Эта обучающая программа позволяет использовать интерактивную платформу для звука и звука, которая используется для управления известным «Саймон Сэйс», также как и управление MIDI. Ambos modos operados con los pies! Antecede
MIDI Step Interface: 12 шагов (с изображениями)
")
MIDI Step Interface: испанская версия здесь. В этом руководстве мы покажем вам, как создать световой и звуковой интерфейс, который можно использовать для воспроизведения " Simon Says " и как MIDI-интерфейс. В оба режима вы будете играть ногами. Фон Проект родился потому, что